Experiment
23.05.2018, 15:23 Uhr
Roboter lernt Abläufe durch Beobachten
Forscher von Nvidia haben ein KI-System entwickelt, das Aktionen dank Tiefenlernen nachmachen kann. Dazu lernt es den Ablauf erst durch das Beobachten eines Menschen und führt die Aufgabe dann aus.
(Quelle: YouTube/Nvidia)
Forscher von Nvidia haben gemäss Angaben des Unternehmens ein einzigartiges KI-System entwickelt, mit dem ein Roboter durch das Beobachten eines Menschen lernt, eine bestimmte Aufgabe auszuführen. Als einfaches Beispiel dient dabei das Stapeln verschiedenfarbiger Bauklötze. Der Ansatz ist dazu gedacht, die Kommunikation zwischen Mensch und Maschine zu erleichtern. Dies soll dazu beitragen, dass Personen und Roboter in Zukunft problemloser zusammenarbeiten. Denn die wenigsten Menschen seien bewanderte Entwickler, die Maschinen klassisch per Programmcode neue Dinge beibringen können. «Damit Roboter nützliche Aufgaben in der realen Welt ausführen, muss es einfach sein, dem Roboter die Aufgabe zu kommunizieren», schreiben die Forscher Stan Birchfield und Jonathan Tremblay in ihrer aktuellen Arbeit.
Ihr Ansatz, damit in Zukunft jeder Maschinen neue Tricks beibringen kann, ist denkbar einfach: «Mit einer Vorführung kann ein Nutzer einem Roboter eine Aufgabe kommunizieren und Hinweise darauf geben, wie dies am besten zu erledigen ist.» Die Forscher nutzen eine Reihe neuronaler Netze für einzelne Aufgaben wie die Objekterkennung oder das Erstellen eines Programms. Damit kann ihr Roboter aus einer einzigen Vorführung lernen, wie beispielsweise eine Reihe Bauklötze zu stapeln ist. Dann gibt die Maschine eine für Menschen verständliche Beschreibung, welche Schritte dazu nötig sind. Im Beispiel umfasst das, welche Farbe auf welche andere gestapelt wird. Das erlaubt es dem Nutzer, mögliche Verständnisprobleme beim Roboter zu erkennen und korrigierend einzugreifen, ehe die Maschine loslegt.
Synthetische Trainingsdaten
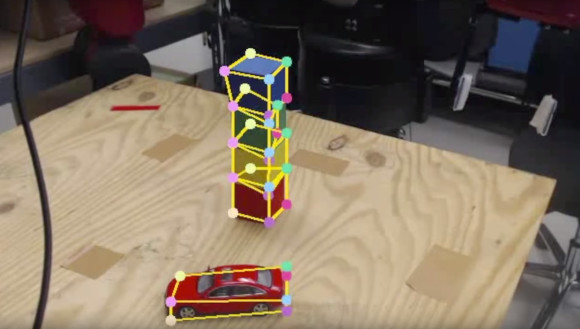
Möglich macht das dem Team zufolge die Nutzung synthetischer Daten zum Trainieren neuronaler Netze. Denn bisherige Ansätze nutzen grosse Sätze von Hand annotierter Daten für das Training, was einen ernstzunehmenden Flaschenhals darstellt. Mit einer geeigneten Datensynthese lassen sich dagegen grosse Sätze annotierter Daten sehr einfach erstellen. Im Experiment nutzen die Forscher eine bildorientierte Datenverarbeitung. So kann das neuronale Netz für die Objekterkennung mit praktisch jedem festen Gegenstand umgehen, der sich gut durch einen umgebenden Quader beschreiben lässt.
Die Arbeit «Synthetically Trained Neural Networks for Learning Human-Readable Plans from Real-World Demonstrations» wird diese Woche im Rahmen der International Conference on Robotics and Automation näher vorgestellt.
Anmerkung: Dieser Artikel ist ursprünglich bei «pressetext.com» erschienen und wurde von Thomas Pichler verfasst.





