Informatiker und Robotiker der ETH Zürich haben eine Roboter-Gehhilfe entwickelt, die Senioren mobiler macht. Nun wartet Smart Walker auf einen Industriepartner, der ihm zur Serienreife verhilft.
Wenn das Gehen immer schwieriger und beschwerlicher wird, verwenden etliche alte Menschen einen Rollator, eine Gehhilfe auf vier Rädern, auf die sie sich abstützen und die sie beim Gehen vor sich herschieben können. Die vorderen Räder sind lenkbar, die hinteren starr. Ein Körbchen für Einkäufe; Bremsen, damit das Gefährt bergab nicht davonrollt – so einfach ist ein Rollator ausgestattet.
Nun hat ein Team von Informatikern und Robotikern der ETH Zürich aus einem Rollator einen autonomen Roboter gemacht, den sie «Smart Walker» nennen. Das Ziel: Älteren Menschen das Gehen und Vorwärtskommen stärker zu erleichtern als dies ein normaler Rollator kann.
Wenig entwickeltes Gerät
Den Anstoss für die Entwicklung eines Roboter-Rollators gab Bertrand Meyer, Professor für Software-Engineering der ETH Zürich. «Die Idee kam mir, als meine Mutter sehr alt war und eine solche Gehhilfe benutzen musste», sagt der Forscher. Rollatoren seien nach wie vor wenig entwickelte Geräte und für gebrechliche oder stark gehbehinderte Menschen nicht ideal. So begann eine Gruppe aus Wissenschaftlerinnen und Wissenschaftlern, im Rahmen derRoboscoop-Initiative im Jahr 2012 an einer besseren Lösung zu arbeiten. Roboscoop ist ein Forschungsprojekt der Professur für Software Engineering der ETH Zürich und des iHomeLab der Hochschule Luzern; als beratendes Organ beteiligt ist auch das Autonomous Systems Lab (ASL) der ETH. Finanziert wurde das Projekt von der Hasler-Stiftung im Rahmen ihres Smart World-Förderprogramms. Das Ziel von Roboscoop ist es, Technologien und Werkzeuge zur Entwicklung von Robotik-Programmen zu verbessern. Und der Smart Walker ist als eine der bedeutendsten Anwendungen aus diesem Projekt hervorgegangen. Vier Jahre nach Projektstart ist nun der Prototyp soweit, dass die Forschenden Industriepartner suchen können, um ihr Gefährt weiterzuentwickeln und zur Marktreife zu führen.
Nächste Seite: Sensoren, Antrieb und Recheneinheit
Sensoren, Antrieb und Recheneinheit
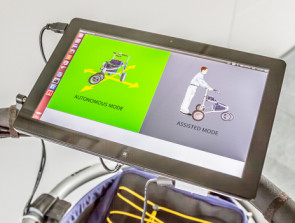
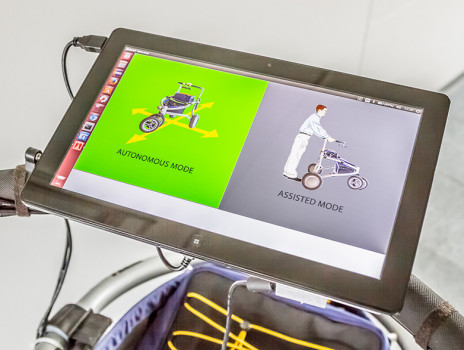
Der Smart Walker sieht zwar nach wie vor aus wie ein Rollator, er ist jedoch vollgepackt mit Prozessoren und Sensoren, die dessen Verhalten steuern. So sitzt an der Unterseite der Lenkstange eine um 360 Grad schwenkbare 3D-Kamera, welche einerseits die Umgebung mustert, andererseits die Distanz des Benutzers zum Walker misst. Dieser Sensor erkennt zudem Gesten. So kann man dem Smart Walker ein Handzeichen geben, worauf er autonom Einstiegsseite voran zu seinem Besitzer rollt. Sensoren sind auch an der Unterseite des Rahmens angebracht. Ein Laser-Sensor misst permanent den Abstand zu den Beinen und überwacht den Untergrund, um Hindernisse zu erkennen. Elektromotoren von e-Bikes, untergebracht in den Naben der Hinterräder, sorgen für Antrieb, sodass Benutzerinnen und Benutzern keine Kraft aufwenden müssen, um den Smart Walker vor sich herzuschieben. Die Geschwindigkeit passt sich automatisch an die des Benutzers an. Ein weiterer Sensor misst die Neigung der Gehhilfe, was beispielsweise in Steigungen dazu führt, dass die Elektromotoren mehr «Gas geben». Gesteuert wird der Rollator über ein einfaches User-Interface: Ein Tablet auf der Lenkstange erlaubt es, zwischen zwei Modi zu wechseln. Die Benutzerinnen und Benutzer können so sehr einfach einstellen, wie sie ihren Robo-Rollator brauchen möchten. Im Assistenzmodus unterstützt der Walker den Benutzer beim Wenden und Bergauffahren, um den dafür nötigen Kraftaufwand zu minimieren. Im autonomen Modus agiert der SmartWalker wie ein autonomer Roboter: Er reagiert auf die Gesten des Benutzers und fährt ohne fremde Hilfe zu diesem hin. Nächste Seite: Paralleles Rechnen als Grundstein
Paralleles Rechnen als Grundstein
So einfach das Gerät aussieht, so komplex ist dessen Programmierung, gerade weil das Gerät mehrere Dinge gleichzeitig kann und tun muss. «Der Smart Walker wird durch eine Software gesteuert, die auf parallelem Rechnen beruht», betont Andrey Rusakov, Doktorand bei Meyer. Beim parallelen Rechnen überlappen sich die einzelnen Rechenaufgaben zeitlich. Normalerweise werden Berechnungen nacheinander durchgeführt. Die Programmierung von parallelem Rechnen ist extrem anspruchsvoll. All die Elektronik braucht Platz: Wie andere Rollatoren besitzt auch Smart Walker ein Körbchen. Bloss sind dort beim Smart Walker Elektronik und Batterie untergebracht. Für Einkäufe bleibt kaum Raum.
Gutes Testresultat
Die Forschergruppe hat ihren Roboter-Rollator in fünf Altersheimen der Stadt Zürich testen lassen. Ein Teil der 23 Probandinnen und Probanden war nicht nur geh- sondern auch sehbehindert oder sogar blind. Mehrere Probandinnen waren 90 Jahre alt oder älter. Die Befragung und Gerätetests leitete Meyers damalige Postdoc-Mitarbeiterin Jiwon Shin, eine der Hauptentwicklerinnen des Smart Walker. Die Rückmeldung der freiwilligen Versuchsteilnehmer bestätigten die Forschenden in ihrem Vorhaben. «Die meisten Probandinnen und Probanden waren von Smart Walker begeistert», freut sich Meyer. Insbesondere fand die Mehrheit das Gehen mit zugeschaltetem Kontrollsystem als komfortabel. Insgesamt schnitt der Smart Walker im Vergleich mit einem normalen Rollator leicht besser ab. Zu den wenigen Kritikpunkten zählten die Grösse und das Gewicht des neuen Geräts. Es ist ziemlich sperrig, und das Herumfahren in engen Gängen eines Altersheimes oder in einem öffentlichen Verkehrsmittel empfanden die Testpersonen als umständlich. Hier wollen die Forschenden denn auch noch den Hebel ansetzen. Nun suchen sie einen Industriepartner, welcher den Prototypen weiterentwickeln und zur Marktreife führen will. Der Preis für ein solches Gerät dürfte gegen 3000 Franken betragen. Als Anwender kommen laut den Forschern ausser den Seniorinnen und Senioren noch eine weitere Zielgruppe in Frage: «Das Gerät ist auch optimal für den Einsatz auf dem Golfplatz geeignet», sagt Meyer.